

News
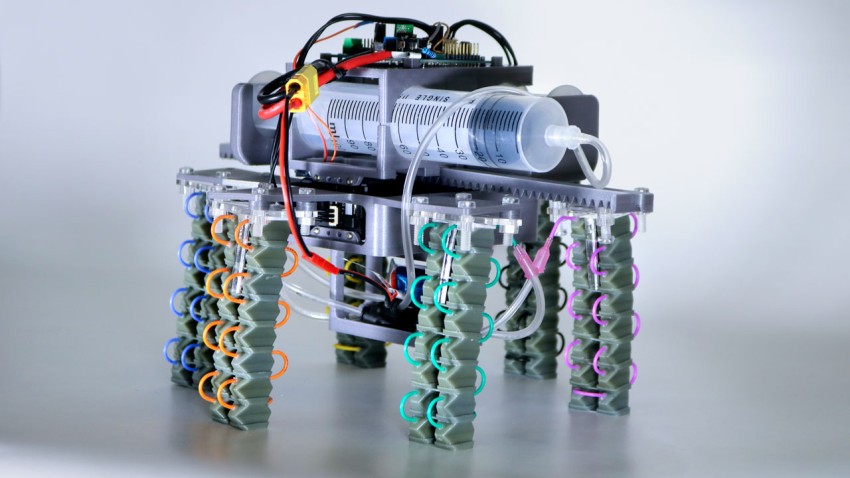
Soft robots harness viscous fluids for complex motions
Researchers designed a new system of fluid-driven actuators that enable soft robots to achieve more complex motions, leveraging the very thing – viscosity – that had previously stymied their movement. Read more about Soft robots harness viscous fluids for complex motions